|
|
新闻信息 科研动态 科研动态
沈阳自动化所机器人与智能系统重点实验室承研嫦娥六号全景相机转台
时间:2024-06-14 来源:
文本大小:【大 | 中 | 小】 【打印】

嫦娥六号着陆器全景相机拍摄的影像图(图片来源于国家航天局) 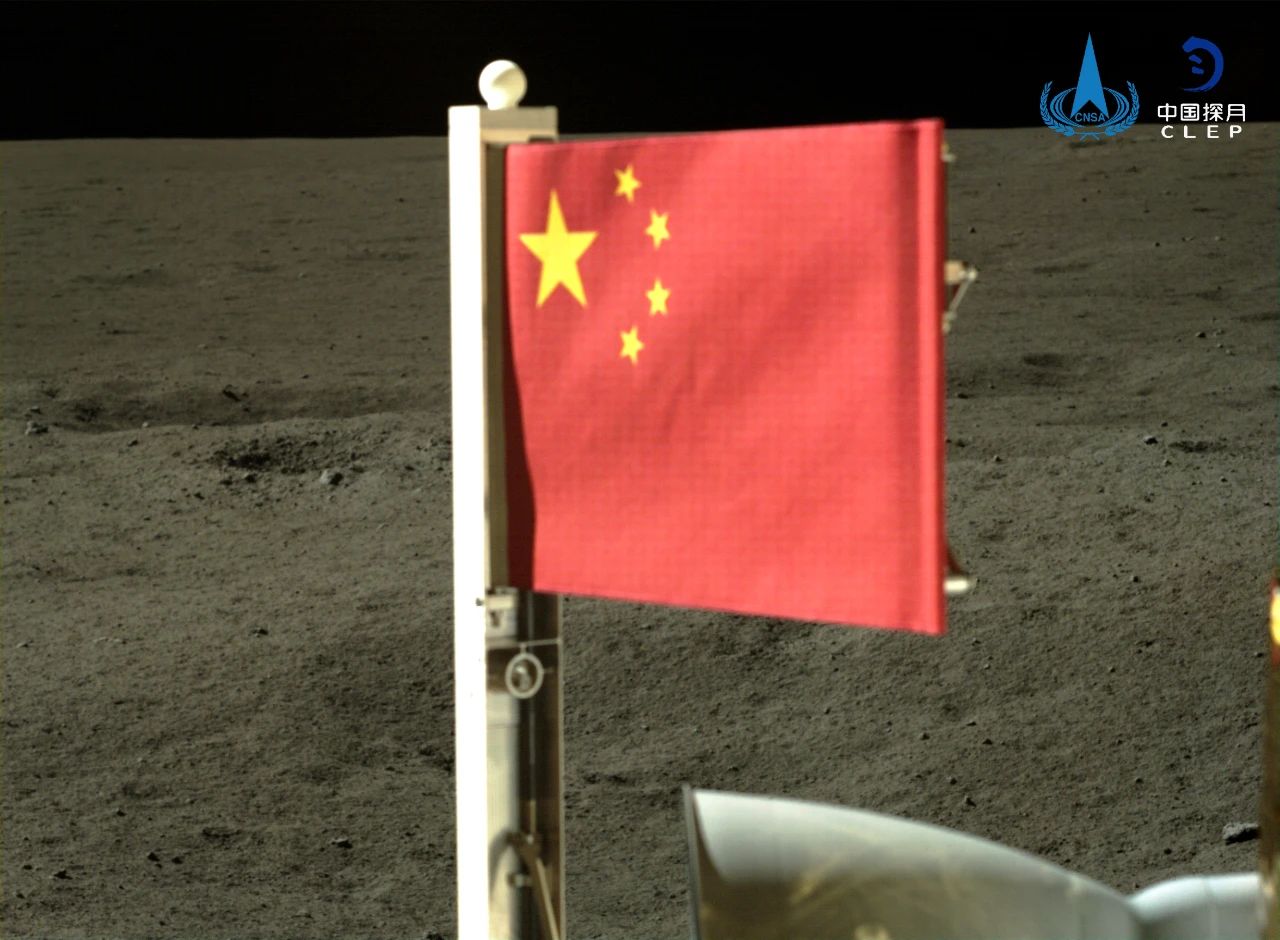
月球背面国旗展示(图片来源于国家航天局) 
全景相机转台 6月4日7时38分,嫦娥六号上升器携带月球样品自月球背面起飞,成功将上升器送入预定环月轨道。6月2日至3日,嫦娥六号顺利完成在月球背面南极-艾特肯盆地的智能快速采样,表取完成后,嫦娥六号着陆器携带的五星红旗在月球背面成功展开。这是中国首次在月球背面独立动态展示国旗。 在探月工程四期嫦娥六号任务中,中国科学院沈阳自动化研究所机器人与智能系统重点实验室(机器人学国家重点实验室)承担了全景相机转台的研制工作。在月面严酷环境下,全景相机转台支撑嫦娥六号完成了月球表面全景成像,表取采样区域成像,以及国旗在月球背面独立动态展示成像等科学和工程目标。在圆满完成预定的目标任务后,全景相机转台完成了临时新增的探测器其他载荷运动成像任务。 全景相机转台隶属于有效载荷分系统,采用了机械臂式的两自由度构型,具有运动范围大、运动精度高、承载大、自重小、功耗低、环境适应性强等独特优点。 近年来,沈阳自动化所深入开展空间机器人技术研发,成功研制了系列航天智能装备,应用于载人航天、月球与深空探测、卫星组网等国家重大工程,为建设航天强国做出了应有贡献。
|
版权所有 © 2009 中国科学院沈阳自动化研究所
电话:024-23970130
E-mail:rlab@sia.ac.cn
电话:024-23970130
E-mail:rlab@sia.ac.cn

 公告
公告