|
|
新闻信息 科研动态 科研动态
机器人学国家重点实验室在行人重识别领域研究取得新进展
时间:2023-08-17 来源:
文本大小:【大 | 中 | 小】 【打印】
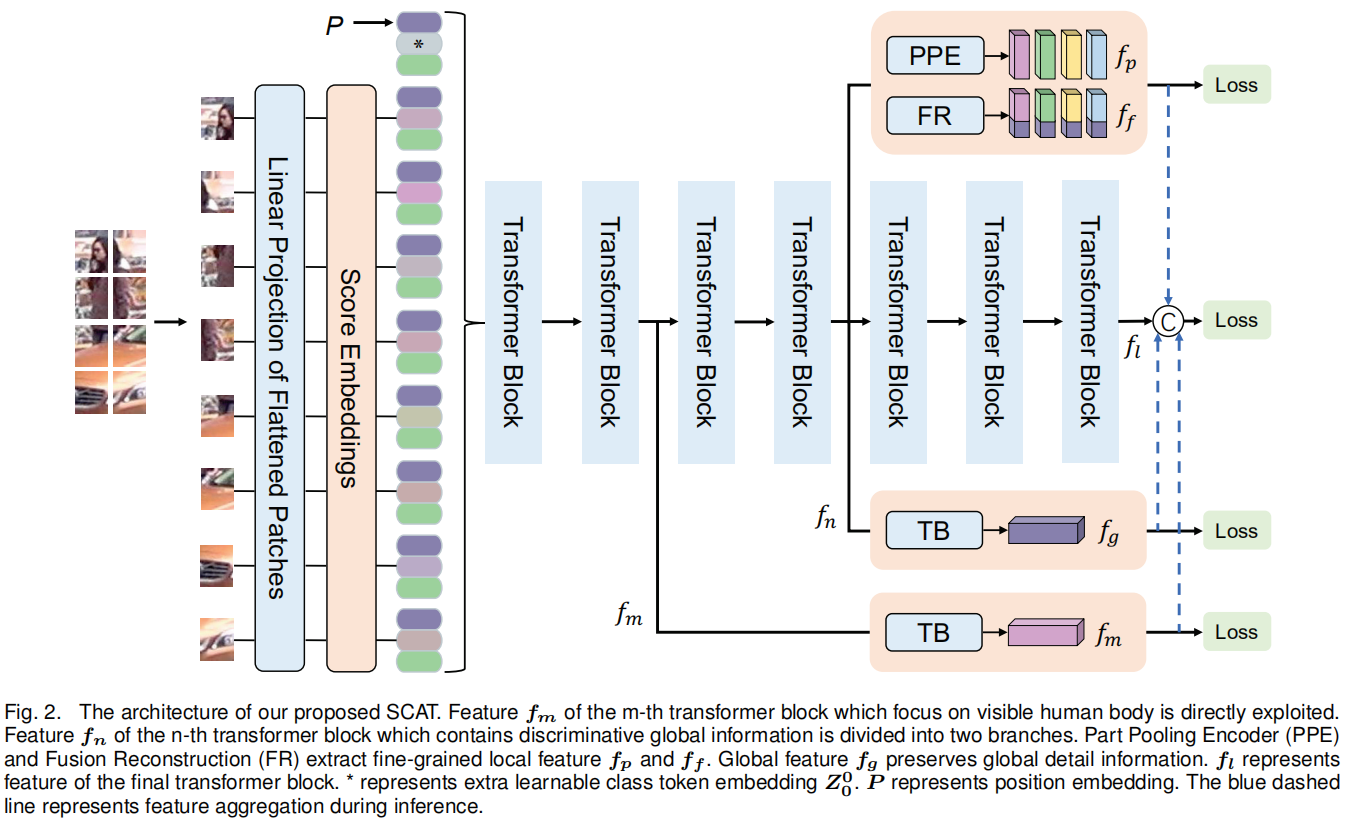
基于Transformer注意力机制的遮挡行人重识别算法框架 近日,机器人学国家重点实验室机器人视觉研究组在遮挡行人重识别领域取得新进展,提出了一种遮挡行人重识别算法。该研究成果在线发表于工业信息领域国际期刊IEEE Transactions on Industrial Informatics(中国科学院一区Top类,IF:12.3)。 行人重识别指通过非重叠摄像头检索同一个行人目标,是行人检测和行人跟踪的重要环节,可用于视频监控、交通管理、智能安防、刑事侦查、多机协同检测等。然而,大多数现有的行人重识别方法都基于目标在图像中完整可见的假设,由于真实场景中存在汽车、广告牌、树木等遮挡物,导致识别目标难以匹配。 科研人员针对这一问题提出了一种基于Transformer注意力机制的遮挡行人重识别算法。研究中发现在利用Transformer提取行人特征时,浅层网络提取的特征分布在局部目标区域;中间层网络的注意力集中在可见行人部分;高层网络的注意力聚焦全局行人特征。基于这一发现,研究团队提出了跳连接聚合Transformer网络(SCAT),利用中间层特征、高层特征和细粒度局部特征来增加特征多样性,提升遮挡行人目标的重识别精度。在多个数据集上验证了所提方法的有效性,包括遮挡数据集、部分数据集和全身数据集。 研究成果得到了国家自然科学基金委员会、中国科学院青年创新促进会和机器人学国家重点实验室的大力支持。 论文链接:https://ieeexplore.ieee.org/document/10098924
|
版权所有 © 2009 中国科学院沈阳自动化研究所
电话:024-23970130
E-mail:rlab@sia.ac.cn
电话:024-23970130
E-mail:rlab@sia.ac.cn

 公告
公告