七轴医用协作机器人
时间:2021-02-03 来源:
文本大小:【大 | 中 | 小】 【打印】
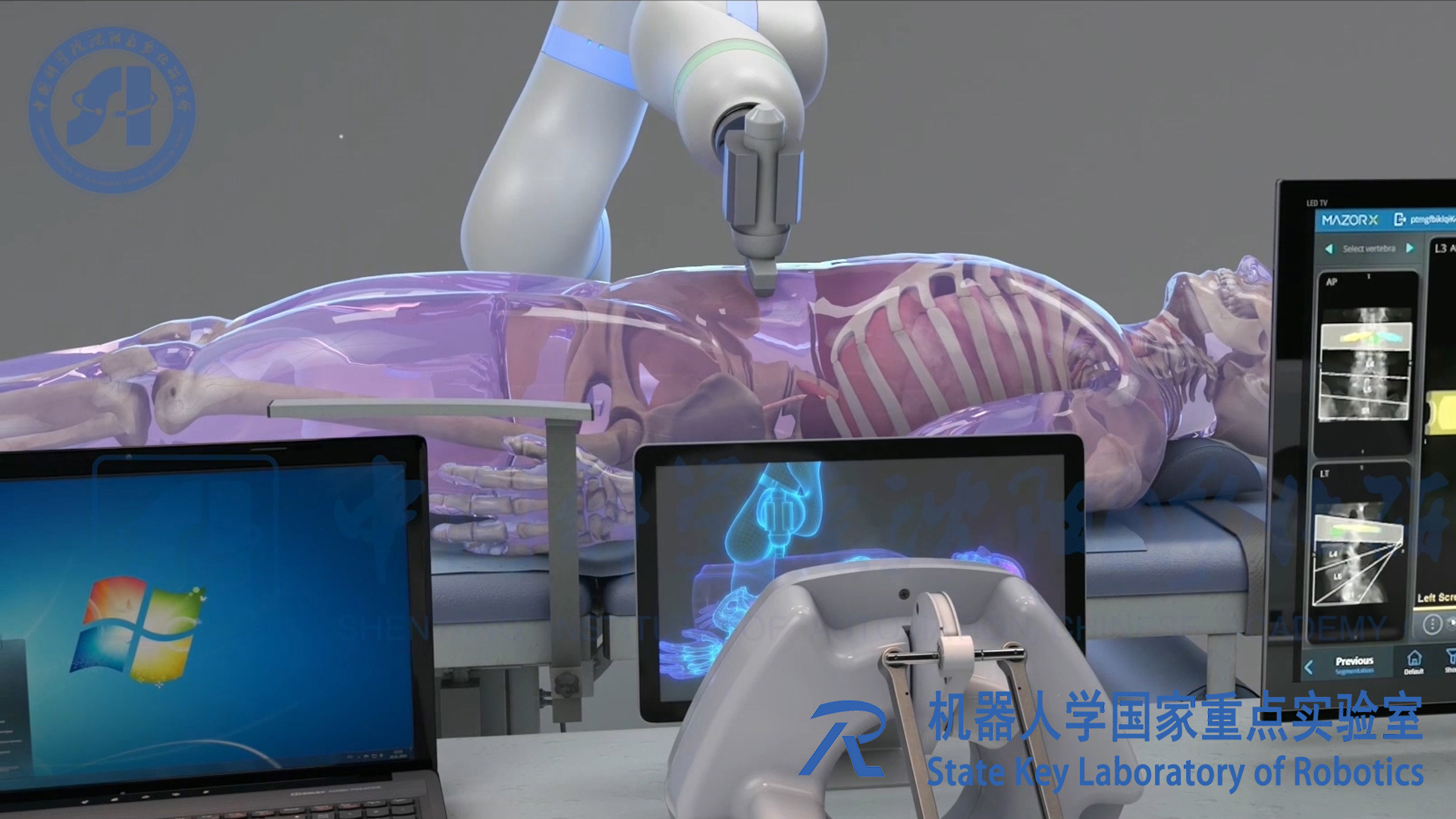
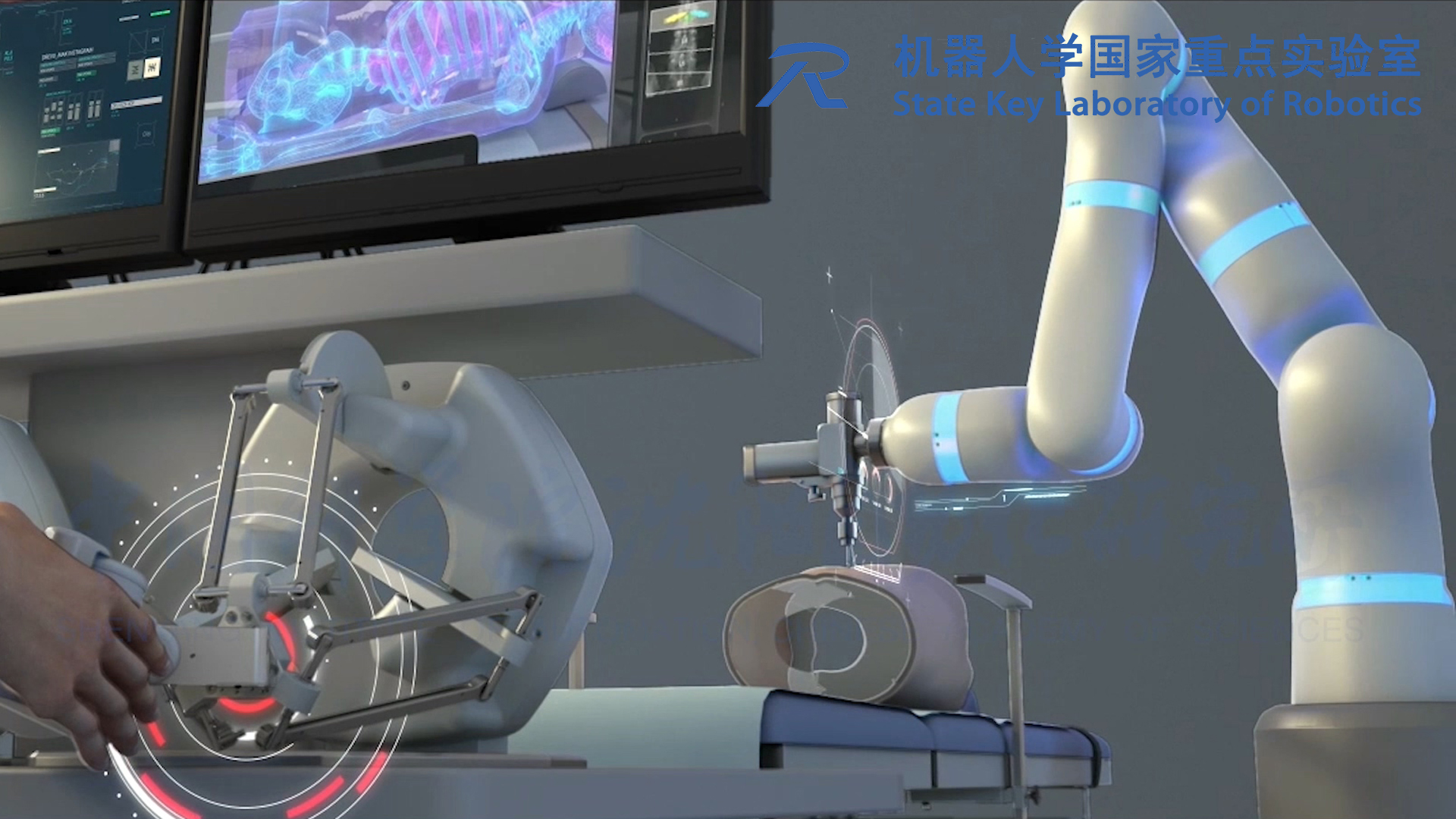
这是一款兼顾柔性与刚度的七轴医用协作机器人,适用于生物科技领域和医疗行业。采用七自由度仿人手臂设计,结合虚拟围栏和力触感知安全功能,可以在无隔离围栏的情况下与医护人员安全协作。机器人操控方式有拖动示教、遥操作以及全自主控制三种。7个关节模块内集成的力传感器可以灵敏感知机器人受到的外力,通过实时动力学计算和安全功能模块,实现碰撞检测和协作安全。末端定位精度0.1mm,关节力测量精度0.2%。机器人末端通过配备不同的执行部件,可以完成诊断、定位、治疗、康复等功能。机器人表面涂层采用纳米抗菌疏水涂层,具有良好的抗磨损和生物相容性,防止消毒过程中对材料的腐蚀和降解。操作系统基于图形化编程,可在编程区拖拽功能模块实现机器人相关流程控制的逻辑编程,方便直观,简单易学。
版权所有 © 2009 中国科学院沈阳自动化研究所
电话:024-23970130
E-mail:rlab@sia.ac.cn
电话:024-23970130
E-mail:rlab@sia.ac.cn