单孔腔镜手术机器人
时间:2021-02-03 来源:
文本大小:【大 | 中 | 小】 【打印】
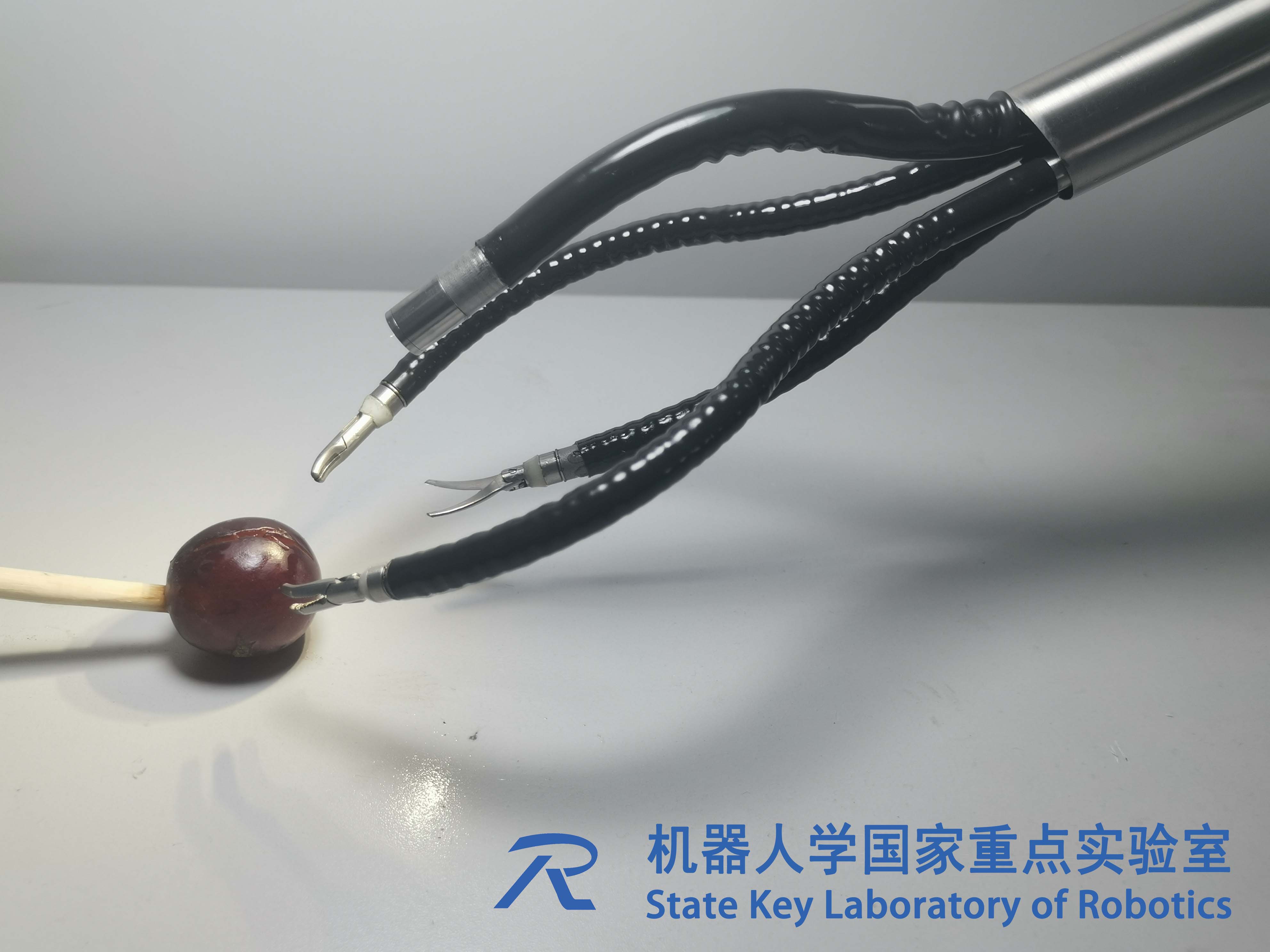
单孔腔镜手术由单一创口向腹腔置入多个器械开展手术,相比传统的多孔腔镜手术具有更加微创、恢复快、以及手术美容等诸多优点。但依赖于传统硬性腔镜器械的单孔腔镜手术存在“直线视野、操作三角丧失、器械干扰” 等诸多难题。在多孔腹腔镜手术领域,达芬奇手术机器人已经取得了巨大的成功,单孔腔镜手术也必然朝着机器人化操作的方向迈进。与多孔腹腔镜手术机器人相比,单孔腔镜手术机器人具有具有创伤小、无疤痕、手术美容;无外部机械臂干涉、能适应狭窄腔道等一系列优点。机器人学国家重点实验室医疗机器人团队在国家重点研发计划的支持下,突破运动解耦的连续体机器人、高清3D柔性内窥镜、一体化集成悬挂机械臂、精确主从控制技术等多项核心关键技术,研制了单孔腔镜手术机器人系统。系统由三支7自由度手术操作臂、高清3D柔性内窥镜臂构成前端执行臂;后端设计一体化集成的6自由度远心定位悬挂机械臂,并设计双7自由度力反馈操作主手、主从控制系统、3D图像显示系统等。能够完成腹腔手术中典型的套圈、缝合、打结等一系列操作,并成功完成普外科胆囊摘除与泌尿外科肾切除动物实验。
版权所有 © 2009 中国科学院沈阳自动化研究所
电话:024-23970130
E-mail:rlab@sia.ac.cn
电话:024-23970130
E-mail:rlab@sia.ac.cn