[English]
首页
实验室简介
实验室概况
实验室领导
学术委员会
研究方向
重点研究方向
主要成果及在研内容
新闻信息
科研动态
学术交流
科研成果
获奖成果
发表论文
授权专利
出版专著
视频图片
海
陆
空
工业机器人
微纳
医疗
视觉
研究队伍
院士
实验室主任
学术带头人
科研队伍
招聘信息
创新文化
实验室文化活动
实验室简报
实验室标识
科研设施与技术服务
现有科研条件
主要仪器设备
对外技术服务
联系我们
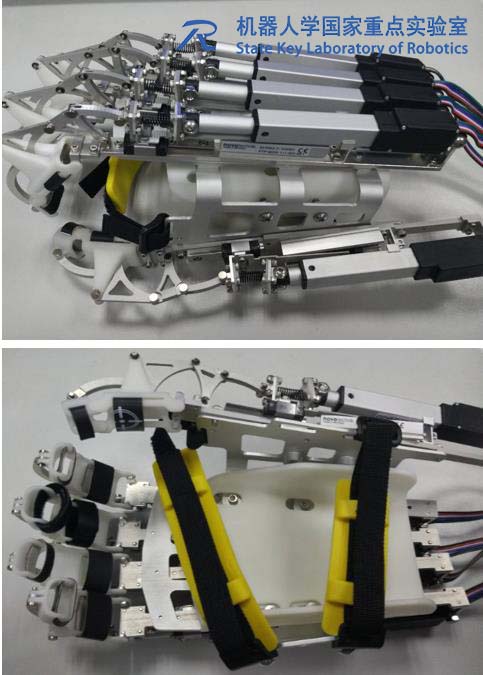
手部康复机器人
时间:2021-02-02 来源:
文本大小:【
大
|
中
|
小
】 【
打印
】
为了更好地辅助脑卒中患者进行偏瘫手部康复训练,我们研发了基于肌电交互的手部康复机器人系统,该系统采用电机加弹簧驱动传动方式具有一定柔性性和安全性,具有主被动两种模式能够覆盖整个康复周期。被动训练模式适合康复训练的前中期,帮助患者手部恢复自主运动能力;康复训练的中后期,主动训练模式可以通过肌电信号识别患者运动意图帮助患者进行主动康复训练,提高患者康复效率。
附件
相关文档
版权所有 © 2009 中国科学院沈阳自动化研究所
电话:024-23970130 E-mail:rlab@sia.ac.cn
电话:024-23970130 E-mail:rlab@sia.ac.cn