微型爬行机器人
时间:2021-02-03 来源:
文本大小:【大 | 中 | 小】 【打印】
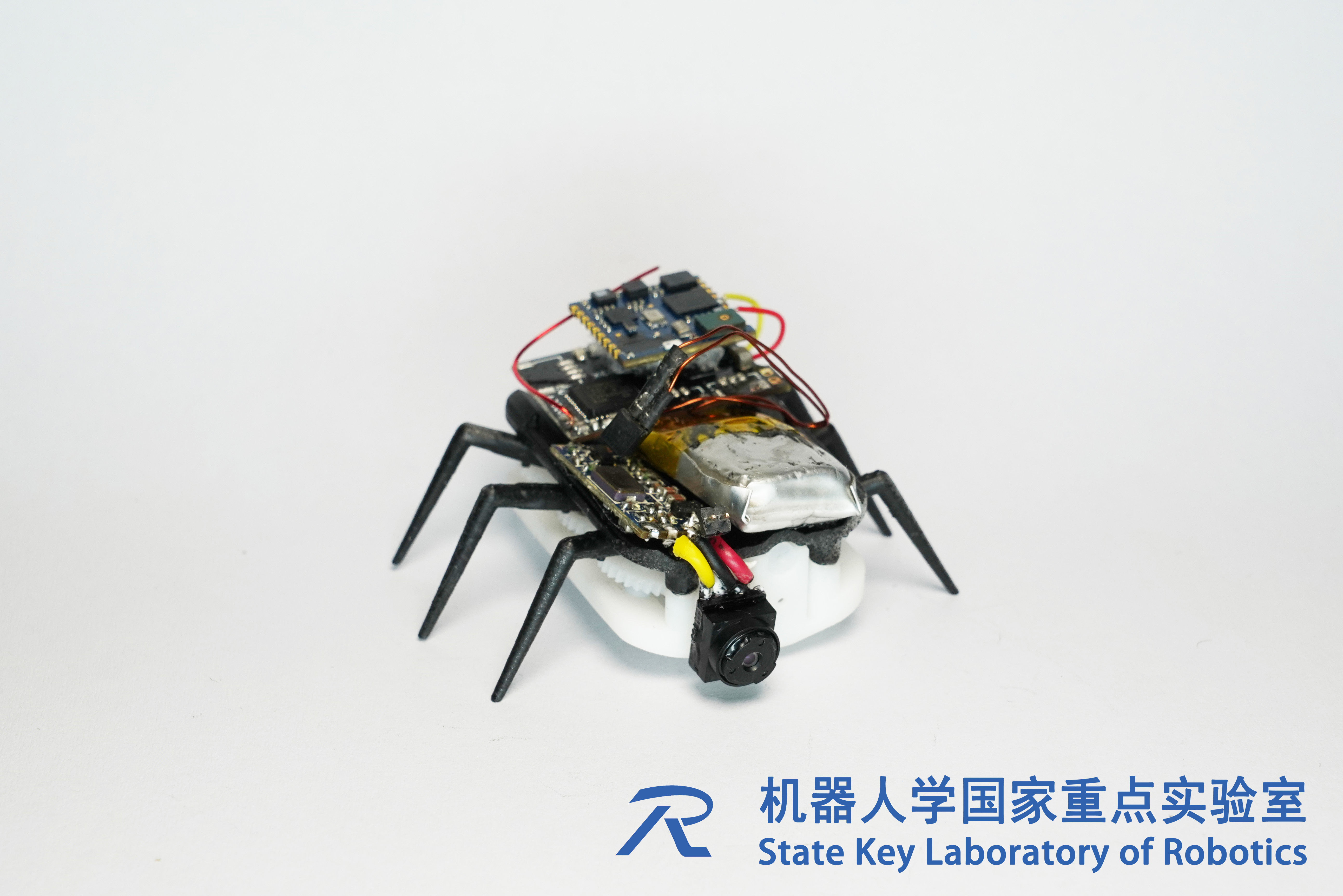
微型爬行机器人研究方向,重点开展了微型仿昆虫高机动运动平台研究,其中包括:微型机器人高效驱动控制算法,六足仿生多模步态机理分析与步态规划研究,基于多支链腿足的仿生爬行机构,腿足纳米结构及其高效环境交互机理,微型电磁驱动装置的控制系统,基于视觉的SLAM算法与位置控制,单目小叶巨细胞避障算法,CPG中枢模式发生器步态控制算法等。
研制了集成电池、控制、底盘、驱动、通讯和音视频采集模块的高机动性微型爬行装置。技术参数如下:(1)机器人机身长度3.5cm,宽度2.5cm;(2)机器人最大爬行速度175mm/s即5倍体长;(3)负载能力大于2g。机器人具有较快的爬行速度和较好机动性能,能够实现直线、圆弧等轨迹爬行运动,最小转弯半径约3cm,可携带微型摄像头及图传实现音视频采集功能。


版权所有 © 2009 中国科学院沈阳自动化研究所
电话:024-23970130
E-mail:rlab@sia.ac.cn
电话:024-23970130
E-mail:rlab@sia.ac.cn