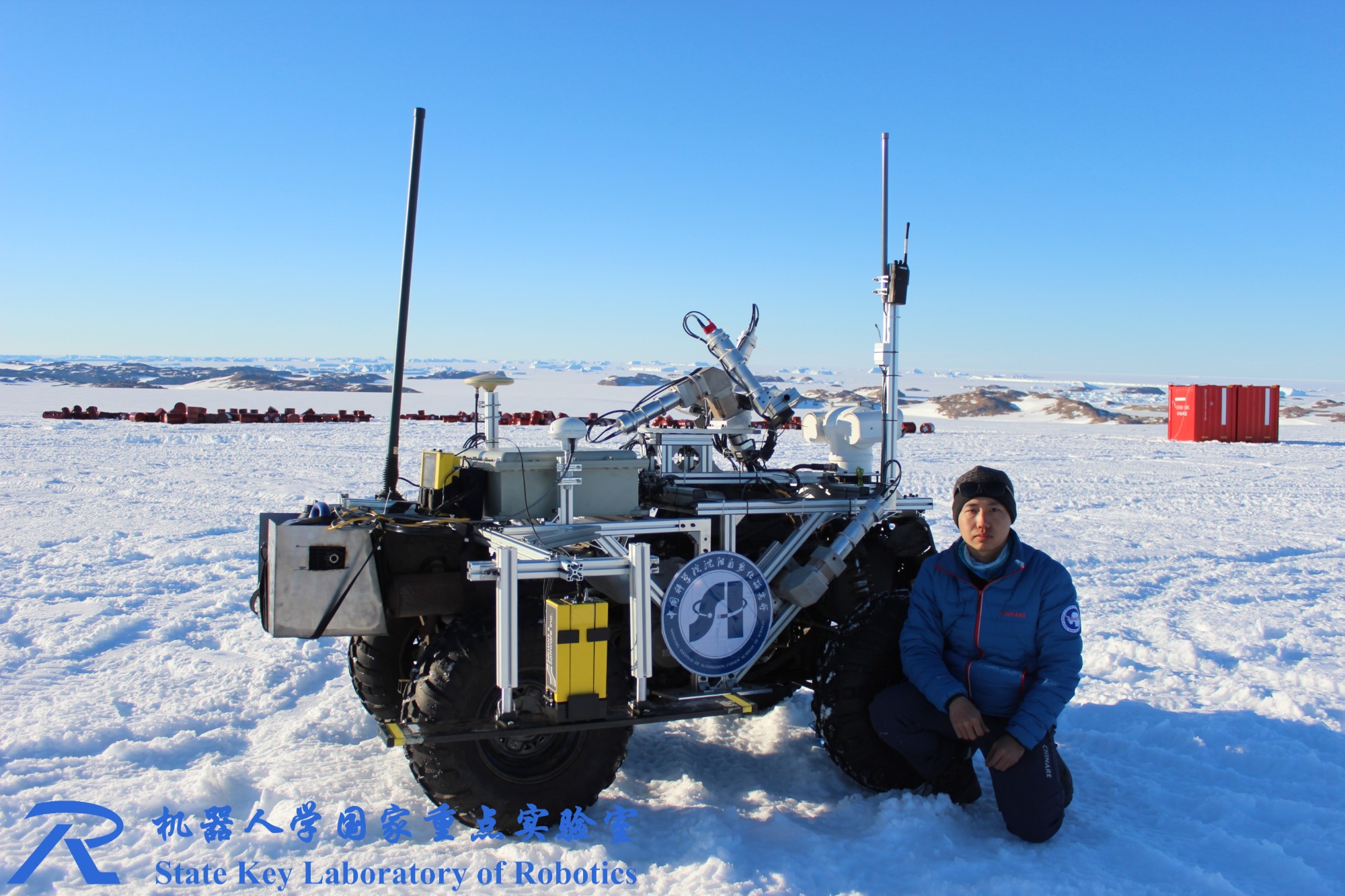
南极科考地面机器人
团队针对南极科考中的探路、运输、探测、采样等多样化需要,主要开展自身安全型探路机器人、运输车辆无人化改造、作业型科考机器人等研究。研究的关键技术包括:(1)适应冰雪地面环境的移动机构与轨迹控制技术。(2)基于多传感器信息融合的冰雪裂隙识别技术。(3)高纬度环境下的自主定位定姿与导航。(4)低温冰雪环境中的作业机械手臂。(5)传统车辆的无人驾驶改造技术。取得的主要成果包括:(1)研制出我国第一台南极冰雪面移动机器人验证样机;(2)完成了我国地面机器人在南极内陆冰盖的首次30公里自主行走测试;(3)研制出我国第一套南极内陆冰结构勘查机器人系统并进行应用;(4)研制出我国第一套南极探路机器人系统并投入实际应用。(5)研制出南极科考地面机器人5套,其中4套完成现场试验。



版权所有 © 2009 中国科学院沈阳自动化研究所
电话:024-23970130 E-mail:rlab@sia.ac.cn
电话:024-23970130 E-mail:rlab@sia.ac.cn
电话:024-23970130 E-mail:rlab@sia.ac.cn
电话:024-23970130 E-mail:rlab@sia.ac.cn