微型扑翼飞行机器人
时间:2021-02-03 来源:
文本大小:【大 | 中 | 小】 【打印】
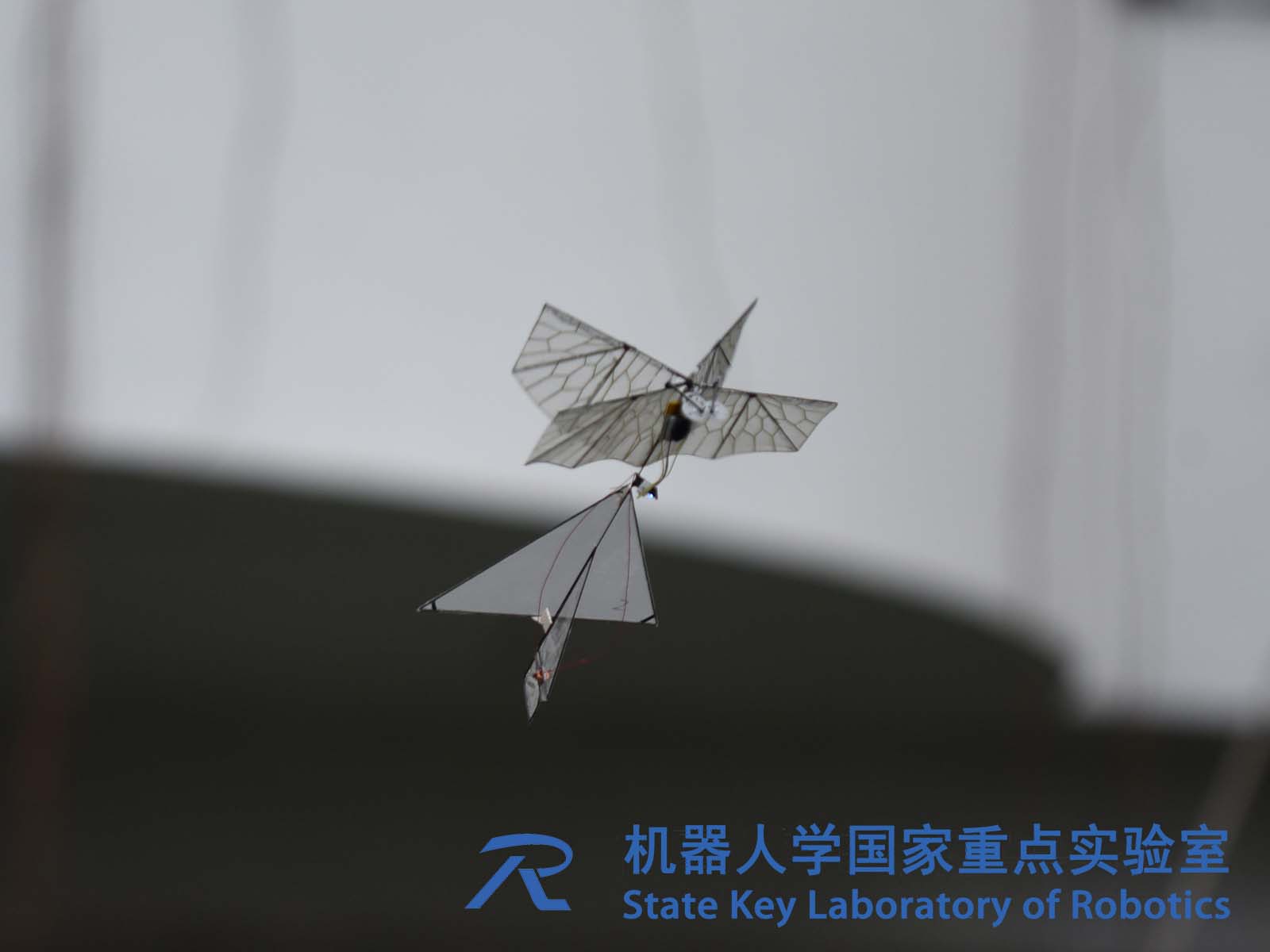
微型扑翼飞行机器人是从仿生学角度采用翅翼的周期性扑动实现巡航、垂直飞行和悬停等飞行模态,其相对于固定翼和旋翼具有更高的飞行效率和机动性能。
机器人学国家重点实验室自2011年以来,在863计划等项目的支持下,经过多年技术积累,深入研究了扑翼飞行机理,攻克了多项扑翼关键技术,逐步提高了的技术成熟度,为实际应用提供了可靠保证。
在仿生扑翼飞行机器人多项基础理论和关键技术方面做了深入研究:仿生扑翼飞行机理分析及空气动力学研究、微机电元件设计制造、轻型复合材料设计优化理论及MEMS仿生翅脉工艺研究、风洞试验及综合性能测量装备研制、飞行控制算法及视觉避障、视觉SLAM算法研究等。成功研制了翼展3cm、10cm以及14cm的多款微型扑翼飞行机器人,可实现基于视觉的自稳定飞行和自主避障等功能,能够完成室内外自主飞行,包括穿越走廊或窗户、室内盘旋以及视频实时回传等任务。14cm机型自重仅为6g,续航时间超过13分钟,达到国际领先水平。


版权所有 © 2009 中国科学院沈阳自动化研究所
电话:024-23970130
E-mail:rlab@sia.ac.cn
电话:024-23970130
E-mail:rlab@sia.ac.cn