仿生水下机器人
时间:2020-08-11 来源:
文本大小:【大 | 中 | 小】 【打印】
经过数百万年的进化和自然选择,鱼类已经进化出完美的体型和游泳运动模式。根据研究,大部分鱼类的游泳效率高达80%,远高于传统的螺旋桨推进器,因此模仿鱼类游动模式成为了水下机器人研究领域受到广泛关注的新方向。在模仿鱼类的原型样机研究中,主流是以模仿鯵科鱼类依靠身体尾鳍摆动推进的机器人研究。但近几年,也慢慢出现了一些以鳐科鱼类,例如蝠噴为原型的仿生机器鱼原理样机的研究,鳐科鱼类拥有宽大的胸鳍,通过波动或振荡胸鳍的方式往前运动。
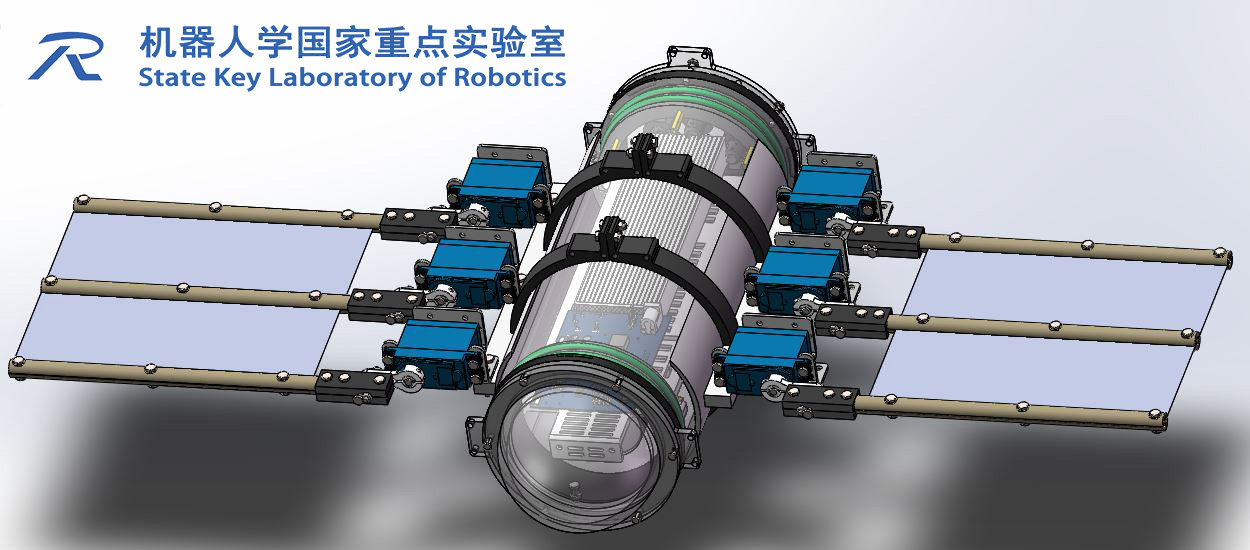
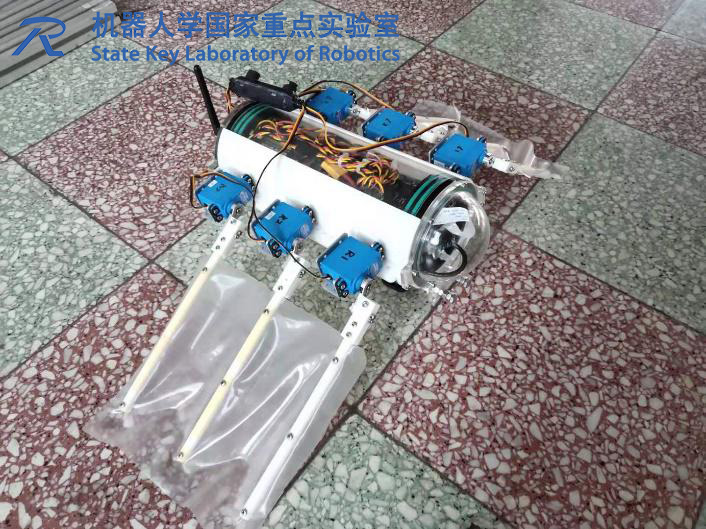
研究生吴梦妍开发了一种模仿鳐科鱼类通过胸鳍上下振荡游动的仿生水下机器人。机器人具有蝠噴一样宽大的胸鳍,鳍条由刚性的光敏树脂材料构成,弹性硅胶膜夹在鳍条之间用以连接相邻的两根鳍条,并构成波动鳍的鳍面。6根鳍条由6台伺服电机独立驱动,能够精准地控制鳍条运动的角位置。机器人完全无缆自治,无线信号传输模块能够将机器人的状态信息上传给岸上电脑终端。机器人内部有一块Raspberry Pi 3B+卡片计算机,通过中枢模式发生器模仿生物的节律运动网络计算出每根鳍条每时每刻的角位移信号。在中枢模式发生器的控制下,鳍条的运动能够模仿鳐科鱼类胸鳍的正弦波动,产生前向的推力。通过控制两侧鳍条振荡的参数:幅值、频率、相位差,可以实现仿生机器鱼巡航、转弯、悬停等运动模态。
仿生鳍的波动不会像传统螺旋桨一样造成周围水环境的扰动,不会惊扰真实水域的水生动物。在带有水草的环境工作不会有推进器被缠绕的问题,适用于水底观测的应用场景。
版权所有 © 2009 中国科学院沈阳自动化研究所
电话:024-23970130
E-mail:rlab@sia.ac.cn
电话:024-23970130
E-mail:rlab@sia.ac.cn