USV自主回收UUV
时间:2020-08-11 来源:
文本大小:【大 | 中 | 小】 【打印】
随着UUV在民用领域和军事领域的广泛应用,其回收问题面临着严峻的挑战。近几年以来,USV技术的爆发式增长,无疑促进USV作为新一类水面无人平台的快速兴起。随着对未来深远海探测需求的增加,USV和UUV单独作业方式已经无法满足下一步任务规模,需要两种无人作业机器人协同作业,取长补短,将两者从作业过程到外形机构设计相结合,达到相互共融,联合作业对深远海海域进行深度、高效、全方位探测,应对未来海洋探测需求。USV自主回收UUV技术就是未来USV与UUV共融协作的关键技术之一。
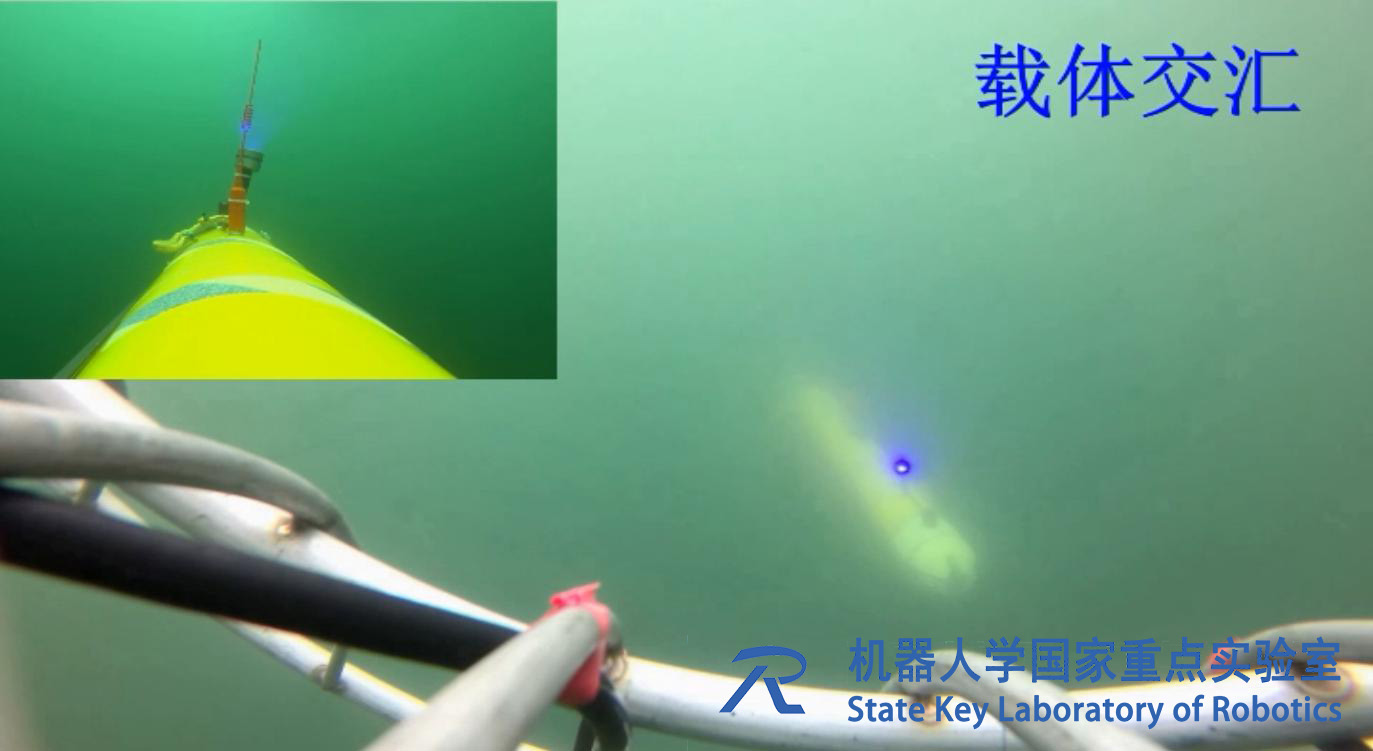
针对UUV自主回收问题,着重开展了拖曳式自主回收方式相关研究工作。为了提高拖曳回收系统自身的航行稳定性,我们在稳定翼尾部安装了两个尾舵用来调节拖曳回收系统在航行过程中的姿态。纯稳定翼式回收系统主要由稳定翼、导向罩、Led灯、电子舱、尾舵、舵机、拖挂板、姿态传感器、压力传感器等组成。稳定翼的主要作用是增强回收系统的稳定性并使绳索处于绷紧状态。根据姿态传感器和深度传感器提供的信息,控制器通过舵机调整尾舵来控制拖曳对接装置的姿态。拖挂板上面为绳索提供了不同的拖挂点,姿态传感器和深度传感器获取对接装置航行状态时的姿态信息和深度信息。当拖曳式回收系统稳定航行在某一固定深度时,UUV通过声学导引和光学导引完成水下对接,进而USV完成对UUV的回收。通过外场试验验证了UUV/USV协同定位与导航方法、水中数据通信方法、水下对接捕获方法等关键技术。

版权所有 © 2009 中国科学院沈阳自动化研究所
电话:024-23970130
E-mail:rlab@sia.ac.cn
电话:024-23970130
E-mail:rlab@sia.ac.cn