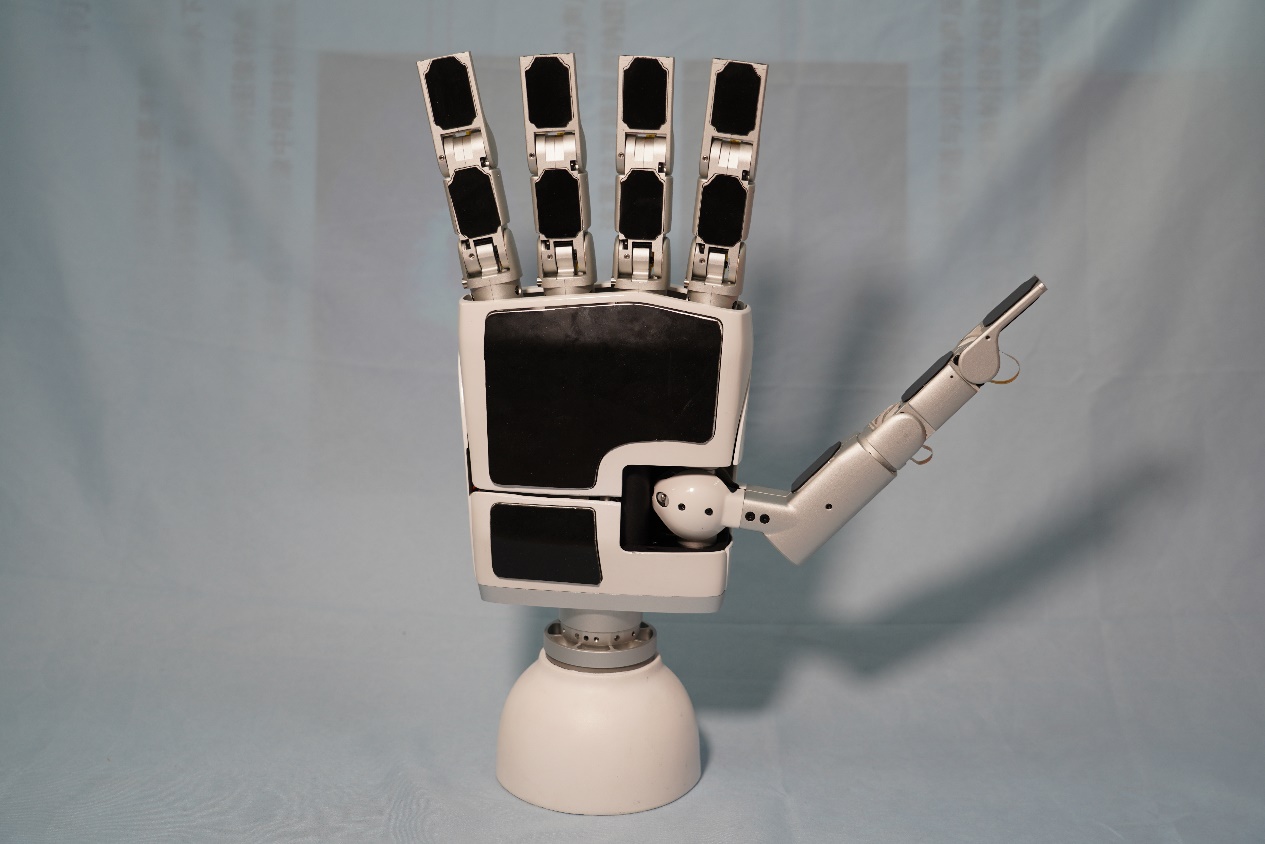
遥操作环境机器人灵巧手具有类似人手的外观和功能,用于抓取各种异型物件,进行仿人操作,具有5个手指,最大负载可达 5 公斤,支持位置控制和力控制。
联系人:张峰,电子邮件: zhangfeng@sia.cn。