|
|
新闻信息 科研动态 科研动态
沈阳自动化研究所机器人学国家重点实验室研制新型基站式ROV系统圆满完成3000米验收海试
时间:2021-01-12 来源:
文本大小:【大 | 中 | 小】 【打印】
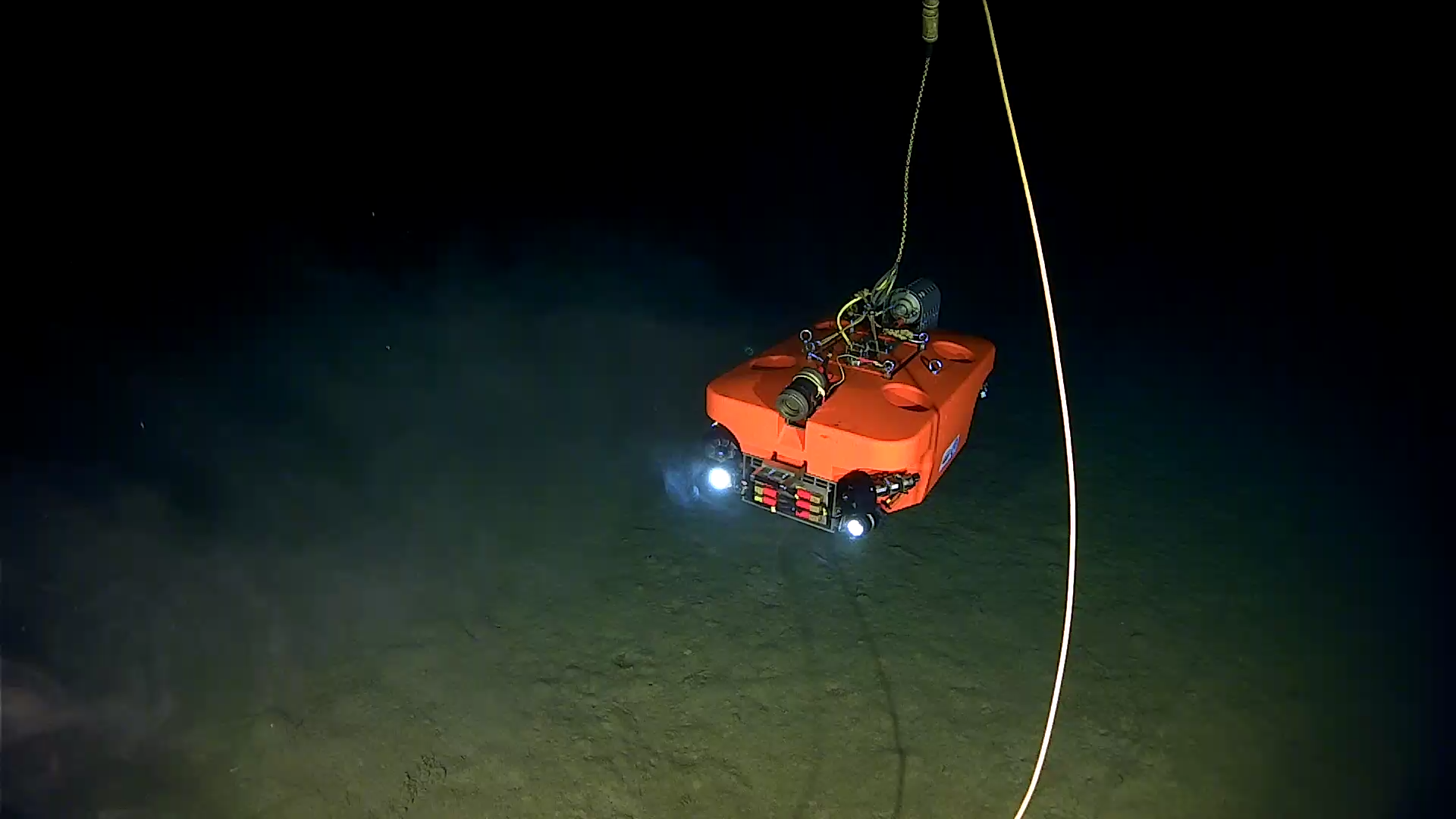
漫游者潜水器在浮游模式下近海底自主回坞航行 
漫游者潜水器履带爬行模式下在海底出库爬行和机械手作业 
5功能机械手在3000米海底捕获生物场景 近日,由中科院沈阳自动化研究所机器人学国家重点实验室研制的深海基站式新型ROV系统——漫游者潜水器,搭载“鹿岭号”多位点着陆器上,圆满完成3000米级验收海上试验。 在验收海试中,漫游者潜水器在3000米海底顺利完成了最大工作深度、运动半径、浮游和爬行双模式下的功能和技术指标验证,基于小型声纳引导实现了自主回坞,利用自研的小型5功能模块化机械手成功布放回收了标识物,并完成了深海生物捕获。漫游者潜水器研制突破了双运动模式模块化对接、电缆与电池组复合供电及基于摆臂履带的复杂海底底质自适应行走等关键技术,具备长时间近海底区域精细探测和作业能力。漫游者潜水器的研制成功,为基站式大型ROV装备研制奠定了技术基础,在未来海洋工程及科考作业中具有广阔应用前景。 “漫游者潜水器技术研究”是国家重点研发计划“深海关键技术与装备”重点专项项目“多位点着陆器和漫游者潜水器”课题,隶属“基于新原理、新技术的潜水器研发”指南方向,沈自所负责漫游者潜水器研发,深海所负责“鹿岭号”多位点着陆器研制。
|
版权所有 © 2009 中国科学院沈阳自动化研究所
电话:024-23970130
E-mail:rlab@sia.ac.cn
电话:024-23970130
E-mail:rlab@sia.ac.cn

 公告
公告