|
|
新闻信息 科研动态 科研动态
多孔介质材料让自主水下机器人“游”得更远
时间:2020-07-10 来源:
文本大小:【大 | 中 | 小】 【打印】
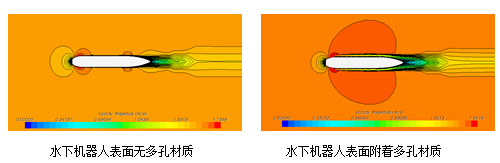
水下机器人附近流体速度梯度变化图 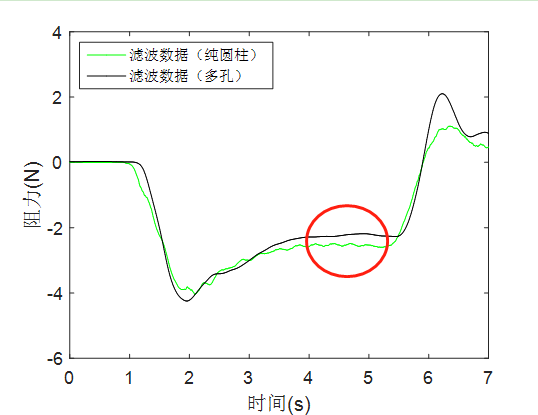
红色圆圈内表示圆柱体稳定航行时表层有无多孔介质的阻力对比情况 近日,中国科学院沈阳自动化研究所机器人学国家重点实验室科研团队提出了一种可提高自主水下机器人续航力的方法,通过采用多孔介质材料作为耐压壳体表层,降低航行阻力,可使自主水下机器人在外形和电池容量不变的情况下“游”得更远,相关成果发表于 Ocean Engineering。 目前,大多数自主水下机器人通过自身携带能源供电,受电池能量密度等因素影响,为提高其续航能力,通常会选择低功耗电子设备、高效推进方法和低阻力外形设计。沈阳自动化所机器人学国家重点实验室研究人员提出了一种采用多孔介质材料作为耐压壳体表层的方法降低航行阻力,从而提高自主水下机器人的续航能力。 在该项研究中,科研人员分析了自主水下机器人表面采用多孔介质材料作为耐压壳体表层时的力学特性和减阻机理,并以Renus100AUV和Suboff本体为研究对象,开展了多工况条件下的仿真对比测试,结果发现,多孔介质材料的厚度及粘性系数与水下机器人的航行阻力密切相关。航行阻力随着多孔介质的厚度和粘性系数的增加而增大。以Remus100AUV以航速1.54m/s航行为例,当多孔材料的粘性系数约为830 kg/m3s时,水下机器人表面附着多孔材质时的航行阻力与表面无多孔材料时的航行阻力接近;当多孔材料的粘性系数小于830 kg/m3s时,其航行阻力比表面无多孔材料时的航行阻力小,并且航行阻力随着多孔粘性系数的减小而减小。 仿真与试验结果表明,多孔介质材料能够改变水下机器人表层流体特性,并且在一定工况条件下,附着在水下机器人表面的多孔介质材料确能减小水下机器人的航行阻力,从而在其它条件相同的情况下可进一步提高自身续航能力。
|
版权所有 © 2009 中国科学院沈阳自动化研究所
电话:024-23970130
E-mail:rlab@sia.ac.cn
电话:024-23970130
E-mail:rlab@sia.ac.cn

 公告
公告